4.5.- MÉTODOS ESPECIALES PARA EL MOVIMIENTO PLANO DEL CUERPO RÍGIDO.- TRABAJO Y ENERGÍA CINÉTICA, E IMPULSO Y CANTIDAD DE MOVIMIENTO.
4.5.1.- Principio de Trabajo y Energía cinética.-
4.5.1.1.- Energía cinética de un cuerpo rígido en movimiento plano:
|
Sea:
|
|
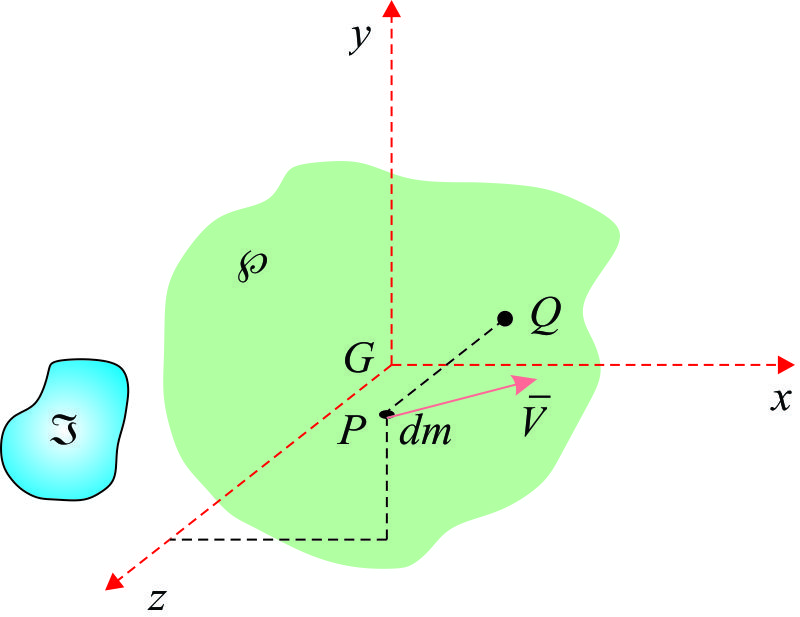
Sabemos, que:

|
[4.5.1.1.0.1]
|
Si :
![]()
![]()
Reemplazando en 4.5.1.1.0.1 y operando:

|
[4.5.1.1.0.2]
|
Nota.- Se tiene dos partes identificables (no componentes), una se refiere al movimiento del centro de masa y la otra al movimiento del cuerpo relativo a G
4.5.1.2.- Energía cinética de un cuerpo rígido en movimiento plano, que implica usar el centro instantáneo de velocidad nula.-
En 4.5.1.1.0.2:
|
[4.5.1.2.0.1]
|


Figura F4-5.1.2
Del teorema de los ejes paralelos (Steiner), tenemos en 4.5.1.2.0.1:
|
[4.5.1.2.0.2]
|
También, si:
![]()
La ecuación 4.5.1.1.0.1, se puede escribir:
![]()
Aplicando la propiedad para el triple producto escalar, ![]() , al integrando, obtenemos,
, al integrando, obtenemos, ![]() , así que la energía cinética es:
, así que la energía cinética es:
![]()
Para cuerpos simétricos al plano de movimiento del G:
|
[4.5.1.1.0.3]
|
4.5.1.3.- Deducción del Principio de Trabajo y Energía Cinética : Trabajo y Potencia en Sistema de Fuerzas y Pares.
Derivando 4.5.1.1.0.2, respecto al tiempo:
![]()

|
[4.5.1.3.0.1]
|

Nota._ El cambio de la energía cinética en el tiempo, da a lugar a la aparición de la suma de la tasa de trabajo o Potencia (P) debido a las fuerzas y pares.
|
4.5.1.3.1.- Para un Cuerpo sometido a un sistema de Fuerzas y Pares (Momentos).-
|
|

![]()
![]()
Sustituyendo en 4.5.1.3.0.1:


Aplicando la propiedad del triple producto escalar, en los pares de el sistema de fuerzas, se tiene:
![]()
Como :


Por lo que, desaparecerán las potencias de los pares producidos por el sistema de fuerzas:
![]()
Luego :
|
[4.5.1.3.1.1]
|
Nota._ 4.5.1.3.1.1 nos indica, que los momentos producidos por el sistema de fuerzas, no producen potencia (tasa de trabajo).
De 4.5.1.3.0.1, se obtiene el trabajo sobre el cuerpo:
|
[4.5.1.3.1.2]
|
Separando variables e integrando, 4.5.1.3.1.2:
![]()
|
[4.5.1.3.1.3]
|

De 4.5.1.3.0.1:
![]()
|
[4.5.1.3.1.4]
|
4.5.1.3.2.- Para dos cuerpos rígidos ![]() y ,
y , ![]() que forman un sistema y suponiendo, que los cuerpos están conectados por un pasador (o articulación) con fricción despreciable:
que forman un sistema y suponiendo, que los cuerpos están conectados por un pasador (o articulación) con fricción despreciable:
|
Sea :

|
|

D.C.L.(s):
|
|


La ecuación 4.5.1.3.1.1 en ![]() y
y ![]() :
:
![]() y
y ![]()
Sumando ambas expresiones:
|
[4.5.1.3.2.1]
|
Donde:
![]()
![]() Potencia de las fuerzas externas ejercidas en el sistema.
Potencia de las fuerzas externas ejercidas en el sistema.
![]()
![]() Energía cinética del sistema.
Energía cinética del sistema.
Nota.- Si hay fricción en el punto de unión, tendríamos momentos o pares interactivos ![]() (desapareciendo si la fricción fuese demasiado grande, en donde
(desapareciendo si la fricción fuese demasiado grande, en donde ![]() ), y la potencia de estos es :
), y la potencia de estos es : ![]() ; que en general no es nulo (es negativo), y trae como consecuencia la disipación de energía por fricción.
; que en general no es nulo (es negativo), y trae como consecuencia la disipación de energía por fricción.
4.5.1.4.- Trabajo efectuado por diversos tipos de fuerzas y pares.
4.5.1.4.1.- Si, ![]() es constante:
es constante:
|
[4.5.1.4.1.1]
|
4.5.1.4.2.- Si, ![]() actúa sobre el mismo punto (del cuerpo
actúa sobre el mismo punto (del cuerpo ![]() ), en su movimiento:
), en su movimiento:
|
[4.5.1.4.2.1]
|
4.5.1.4.3.- Si, ![]() es debido a la gravedad (Z es positivo hacia abajo):
es debido a la gravedad (Z es positivo hacia abajo):
![]()
|
[4.5.1.4.3.1]
|
4.5.1.4.4.- Si, ![]() es la fuerza normal ejercida en el punto de contacto sobre un cuerpo rígido, que mantiene contacto con una superficie fija en
es la fuerza normal ejercida en el punto de contacto sobre un cuerpo rígido, que mantiene contacto con una superficie fija en ![]() , esté el cuerpo rodando o resbalando:
, esté el cuerpo rodando o resbalando:
|
|
|
Figura F4-5.1.4.4
|

|
[4.5.1.4.4.1]
|
|
4.5.1.4.5.- Si,
Si :
|
|

4.5.1.4.6.- Si, ![]() es la fuerza de un resorte lineal conectado a los mismos dos puntos P y Q de los cuerpos
es la fuerza de un resorte lineal conectado a los mismos dos puntos P y Q de los cuerpos ![]() y
y ![]() , durante un intervalo de sus movimientos:
, durante un intervalo de sus movimientos:
Sea :
K ![]() Módulo del resorte.
Módulo del resorte.
![]()
![]() Longitud sin alargamiento.
Longitud sin alargamiento.
![]()
![]() Alargamiento (
Alargamiento (![]() < 0 representa acortamiento ).
< 0 representa acortamiento ).
![]()
![]() Vector unitario a lo largo del resorte, dirigido hacia el cuerpo
Vector unitario a lo largo del resorte, dirigido hacia el cuerpo ![]() .
.
|
|
|
Figura F4-5.1.4.6
|

El trabajo del resorte S sobre el cuerpo ![]() es:
es:
|
[
|
Si :
![]()
Derivándole, con respecto al tiempo:
![]() y sabiendo que:
y sabiendo que: ![]()
Sustituyendo en [ ![]() ]:
]:

![]()
Luego :
|
[4.5.1.4.6.1]
|
4.5.1.4.7.- Fuerzas de un cable inextensible, unidos a dos puntos Q y P de los cuerpos ![]() y
y ![]() , durante un intervalo de su movimiento.- El cable en mención, puede pasar sobre una o más poleas ligeras sin fricción, colocados entre los cuerpos, pero deben estar tensos en todo momento. De hecho el trabajo es igual a cero, lo que demostraremos.
, durante un intervalo de su movimiento.- El cable en mención, puede pasar sobre una o más poleas ligeras sin fricción, colocados entre los cuerpos, pero deben estar tensos en todo momento. De hecho el trabajo es igual a cero, lo que demostraremos.
|
|


![]()
Poniendo ![]() en términos de sus componentes // y
en términos de sus componentes // y ![]() al cable:
al cable:
![]()
Notando, que las componentes perpendiculares a las velocidades, tienen productos escalares nulos con ![]() respectivamente; obteniendo los trabajos, por lo tanto, como sigue:
respectivamente; obteniendo los trabajos, por lo tanto, como sigue:


Tomando la diferencial del cable inextensible:
![]()
|
[4.5.1.4.7.1]
|
4.5.1.4.8.- Para un par ![]() , en 4.5.1.3.0.1 :
, en 4.5.1.3.0.1 :
|
[4.5.1.4.8.1]
|
Si, el momento en Z es constante, el trabajo del par es:
|
[4.5.1.4.8.2]
|
Nota 1.- Si el trabajo es positivo, nos indica que cuerpo gira en la dirección del momento.
Nota 2.- Para fuerzas conservativas, es valido todo lo deducido para un sistema de partículas.