2.5.2.- Movimiento General en el plano (XY) en
![]() .
.
|
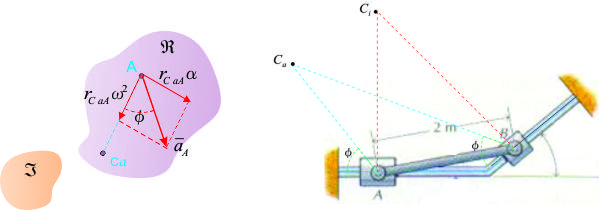
Cuando un cuerpo se sujeta a un movimiento general en el plano, experimenta una combinación de una traslación y una rotación. La traslación ocurre dentro del plano de referencia y la rotación alrededor de un eje perpendicular al plano de referencia a través del punto base o conveniente.
2.5.3.1.- Estudio del Movimiento:
Sea: XY el plano de referencia en
En (4) , (5) y (6) , se tiene:
Analizando las dos últimas ecuaciones (11) y (12):
Conclusión: Se tiene tres incógnitas para cada ecuación, pudiendo dar cada una dos ecuaciones, al igualar componentes; para poder solucionar los problemas recurrimos a los tres métodos más conocidos, que son el: Vectorial, geométrico y escalar.
2.5.3.2.- Método vectorial.- Para este método se usa la ecuación general de la cinemática del cuerpo rígido, para la cual debe conocerse la dirección de la velocidad y de la aceleración de la partícula cuyo movimiento se desconoce o en caso contrario debe conocerse el movimiento angular del cuerpo rígido. Por lo que debe utilizarse las ecuaciones (10), (11) y (12).
2.5.3.3.- Método geométrico.
2.5.3.3.1.- Centro instantáneo de velocidad nula.- Si P es
un punto en el plano de referencia, con velocidad nula en algún instante, entonces el
campo de velocidades del cuerpo rígido
Por ejemplo se tiene el campo de velocidades de una rueda en rodamiento, en la figura siguiente:
Determinación del centro instantáneo (Ci) de velocidad nula:
a).- Rodamiento.-
Sea:
*).- Una sucesión continua de puntos, sobre la superficie de
**).- En todo instante durante su movimiento, los puntos en
contacto tienen el mismo vector velocidad, lo que nos indica, que no puede haber
resbalamiento o deslizamiento entre los puntos de las superficies de
Nota.- Muchos autores usan la frase "rodamiento sin deslizamiento", para describir el movimiento de "rodamiento".
Consideramos tres clases de problemas que implican contacto de rodamiento:
i).- Rodamiento de una rueda
Sea:
También:
Luego, la aceleración del centro instantáneo de velocidad nula es:
Ejemplo: Sobre un plano horizontal, con su respectivo cicloide de la partícula ha considerar.
ii).- Rodamiento de una rueda
*).- Superficie cóncava hacia arriba:
Sea:
Puesto, que sucesivamente estamos definiendo el movimiento, tal que el punto de contacto, tenga velocidad nula (Ci), se tiene:
Derivandole, con respecto al tiempo en el marco inercial, se tiene:
Sabemos:
Luego la aceleración de Ci es:
Para Q:
**).- Superficie cóncava hacia abajo:
Derivandole, respecto al tiempo en el marco inercial tierra:
También sabemos:
Luego:
Es útil considerar la siguiente fórmula, que no depende de ninguna elección particular de un sistema de coordenadas:
Si conocemos
Ejemplo: Rodamiento sobre curvas concavas
iii).- Movimiento de engranajes conectados.- Los engranajes, se usan para transmitir potencia. Sus dientes engranes se perfilan de modo que impartan velocidad constante al engrane impulsado, cuando el engrane impulsor gira a velocidad angular constante (ver figura del ejemplo de engranajes rectos de ejes fijos).
Sin embargo, los engranes violan la condición de rodamiento, por
que, existe necesariamente algún resbalamiento, ya que los puntos de contacto no tienen
velocidades iguales (excepto en
Notándose que la relación de los radios es inversamente proporcional a la relación de las velocidades angulares (y directamente proporcionales a la relación del número de dientes).
Nota.- Si bien las velocidades de los puntos de contacto en los rodamientos tienen las mismas velocidades, pero no así las aceleraciones son iguales, lo que, es si, las aceleraciones tangenciales son iguales en dichos puntos de contacto.
Ejemplo de rodamiento de engranajes
Entendiendo la JUEGO DE ENGRANAJES PLANETARIOS (Recuperado de https://youtu.be/KWTuMyas5wo)
b).- Cuando se conoce las direcciones no paralelas de las velocidades de dos puntos A y B.- El centro instantáneo ci se encuentra en la intersección de las líneas perpendiculares a las direcciones de las velocidades, trazadas por dichos puntos (ver figura).
c).- Cuando las velocidades de los puntos A y B son paralelas.- Para poder determinar el centro instantáneo ci es necesario conocer además de las direcciones, los módulos y sentidos de las velocidades. ci se obtiene de la intersección de las líneas que pasan por los puntos A y B, y la que une los extremos de los vectores velocidades. Si las líneas son paralelas todas las partículas tendrán la misma velocidad, que no implica necesariamente que el cuerpo este en movimiento de traslación (es instantáneo) (ver figuras).
d).- Por linealidad de los centros instantáneos o polos inerciales.-
Cuando dos o más cuerpos están unidos por un punto común, se puede hallar un centro instantáneo para cada cuerpo, que en general no coinciden.
2.5.3.3.2.- Centro instantáneo de aceleración nula.- Análogo al centro instantáneo de velocidad cero, existe otro centro instantáneo de aceleración cero, de tal manera, que se pueda encontrar la aceleración de un punto cualquiera como si el cuerpo estuviese moviéndose alrededor de un eje instantáneo, que generalmente no coincide con el de la de la velocidad cero, salvo caso especifico (ver figura).
a).- Método general para la obtención del centro instantáneo de aceleración nula.-
Lo que nos dice que, para encontrar Ca es necesario
conocer
b).- Caso especifico.- Cuando el cuerpo parte del reposo
(
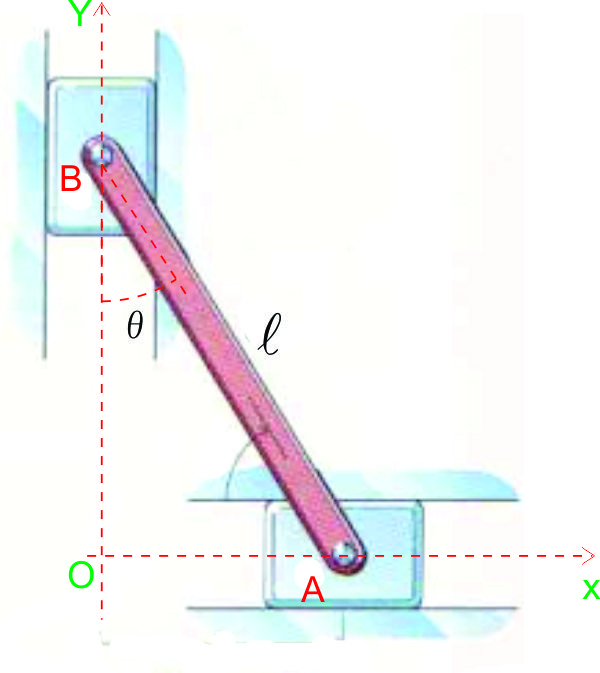
2.5.3.4.- Métodos escalares.
a).- Análisis del movimiento plano en términos de un parámetro.-
En el caso de ciertos mecanismos es posible expresar en las
coordenadas X e Y los puntos significativos, por medio de expresiones analíticas simples
que contienen un solo parámetro.
Si:
Derivandoles, dos veces con respecto al tiempo:
Nota.- Muchas veces se utiliza este método solo, para encontrar el movimiento angular; para luego regresar al método vectorial.
b).- Métodos equipotencial.
Estableciendo relaciones que ligan las distintas variables del movimiento del sólido rígido
i).- Condición de rigidez. La condición de rigidez la podremos expresar por:
ii).- Condición cinemática de velocidades.
Referenciando al sólido rígido respeto de un punto de referencia "O" quedará:
Derivándole respecto al tiempo:
iii).- Condición cinemática de aceleraciones.
Derivando (13) respecto al tiempo:
Dividiendo (14) por
O sea que la proyección de la aceleración en el punto B sobre la dirección
Ejemplo de combinado de los tres movimientos
Trnsformación de Movimiento
Recuperado de https://youtu.be/6h7HGriSTFQ)
Recuperado de https://youtu.be/A_syREyL8Ns
Ejemplo general
Cinemática del Movimiento del Cuerpo Rígido en Movimiento Plano (Recuperado de https://youtu.be/C3TZhGQVTEs)
|