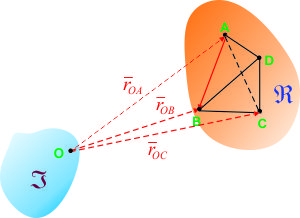
La posición de un sólido rígido queda determinada por la de tres de sus puntos (A, B y C) no colineales, ya que cualquier otro punto (D) del sólido está definido con la condición de que las distancias a los tres primeros sean constantes, y por lo tanto forme un tetraedro invariable (ABCD ver figura).
La posición de cada uno de los tres puntos seleccionados (A, B y C) en el espacio tridimensional necesita tres coordenadas, lo que hace un total de nueve parámetros. Esto podría hacer pensar que son necesarios nueve parámetros para definir la posición de un sólido rígido, sin embargo los tres puntos están relacionados entre sí por la condición de rigidez del sólido, por lo que se pueden plantear las relaciones:
de modo que el número de parámetros necesarios para especificar la posición de un sólido rígido en el dominio tridimensional son seis (9 coordenadas menos 3 relaciones), lo que indica que posee seis grados de libertad. Desde el punto de vista cinemático estos grados de libertad se asocian a tres parámetros de posición (normalmente correspondientes a las coordenadas de uno de los puntos) y tres de orientación (normalmente tres ángulos), lo que da lugar a tres traslaciones (asociadas a las direcciones de los ejes del sistema de referencia) y tres rotaciones.
La orientación de un cuerpo en movimiento en el espacio, es un
caso aún no resuelto en forma cerrada, ya que, encontrar la orientación de un cuerpo en
un tiempo cualquiera, dado:
y la orientación en t = 0; no puede ser expresado en forma vectorial, esto por que, esté no se comporta como una cantidad vectorial finita, por violar la propiedad conmutativa de la álgebra vectorial (luego no es una cantidad vectorial finita).
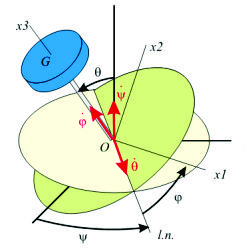
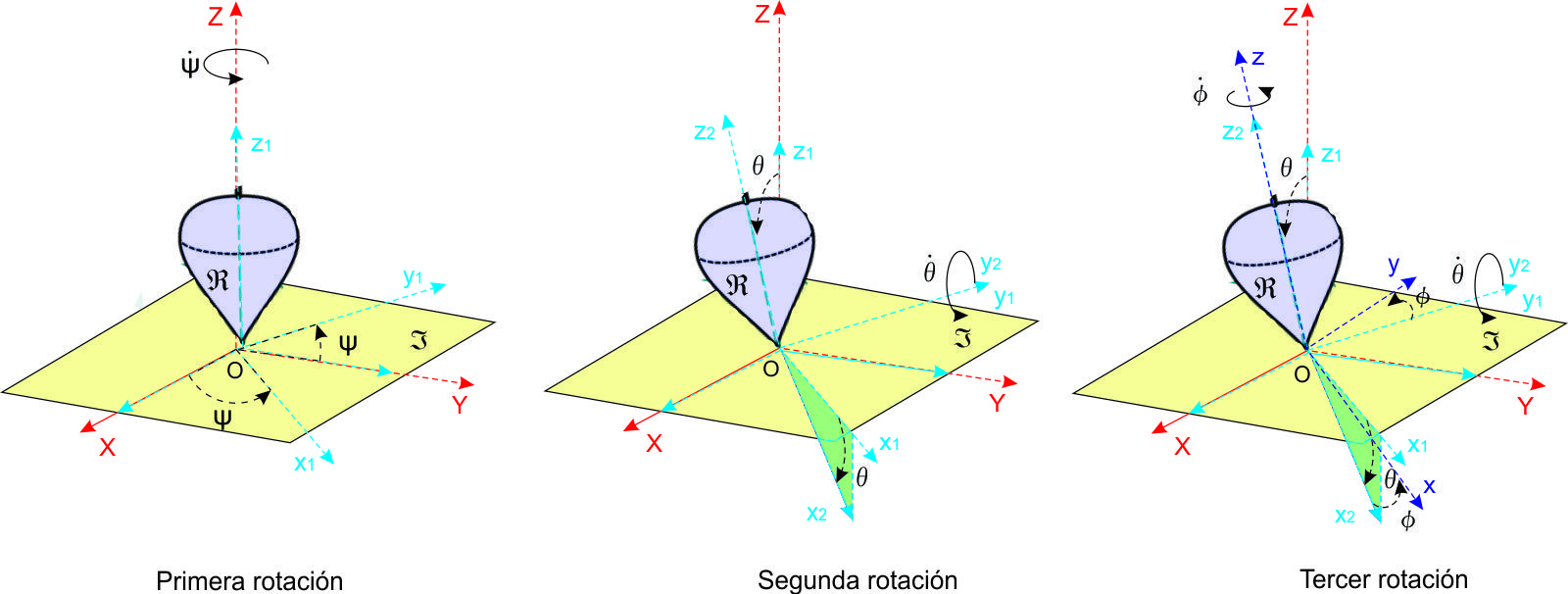
La orientación de un cuerpo rígido puede especificarse completamente considerando un sistema de coordenadas fijo a él. Pero, es necesario especificar la relación entre un sistema de ejes fijo en el marco de referencia inercial y uno fijo en el cuerpo. Podemos construir la transformación entre estos dos sistemas con tres rotaciones virtuales sucesivas del cuerp o rígido: de esta manera se introducen los ángulos de Euler. Existen muchas convenciones para elegir el orden de las rotaciones, cono la convención x , usada por muchos autores y mostrada en la figura F2.3.2.0; sin embargo, en este caso se usará la convención y ,cuyo esquema es el de la figura F2.3.2.1.
Figura F2.3.2.0
Luego la posición de un cuerpo rígido libre en el espacio puede especificarse mediante
la localización de un punto base y la orientación del cuerpo respecto a ese punto. De
este modo se requiere un total de seis parámetros que especifican la posición del cuerpo
rígido: tres (X,Y,Z), para la posición del punto base y tres ángulos de Euler
para la orientación del cuerpo rígido respecto al punto base.
Secuencia de rotación de los Ángulos de Euler de acuerdo a la convensión "Z"
Recuperado de: https://youtu.be/tmtGEHTBSdQ
Obtención de matriz de rotación
Recuperado de: https://youtu.be/i-urXYyErQc
Ángulos de Euler: Introducción (Parte I)
Recuperado de: https://youtu.be/Gji6E9zXN4Q
Ángulos de Euler II: Convertir ángulos de Euler a matriz de rotación (noa)
Recuperado de: https://youtu.be/2gFwy9L4drU
Ángulos de Euler III: Conversión de matriz de rotación (noa) a ángulos de Euler
Recuperado de: https://youtu.be/pddCmF7aGXk
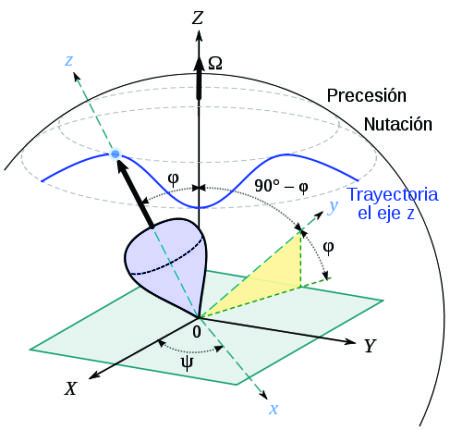
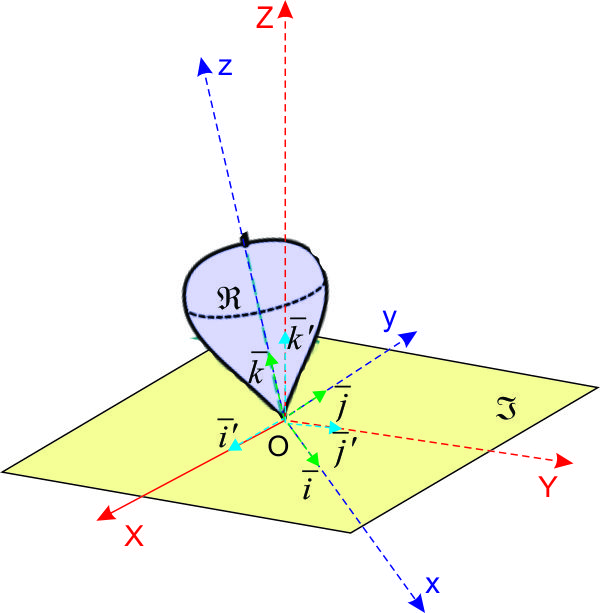
2.3.2.1.- Descripción de los ángulos de Euler convención "Z", respecto al eje "y".-
Sea:
Cuerpo rígido (trompo) orientado, de manera que los ejes (x,y,z) fijos al cuerpo, inicialmente
coinciden con los ejes (X,Y,Z) anclados en el marco de referencia inercial
.
Conjunto de
vectores unitarios de (x,y,z) e (X,Y,Z) respectivamente.
Movimiento de precesión de un giroscopo
Figura F2.3.2.1
Realizamos los siguientes movimientos angulares en forma secuencial:
Figura F2.3.2.1a
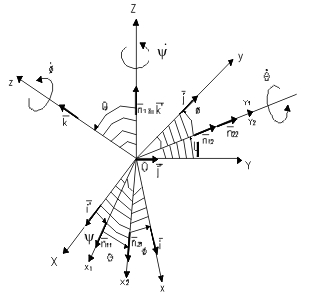
Representando lo realizado en la figura F2-3.2.1.a en la figura F2-3.2.1b
Figura F2.3.2.1b
Donde:
a).-
anclados en el marco intermedio
.
b).-
velocidad angular, respecto al marco inercial
.
c).-
vectores unitarios, paralelos a
respectivamente.
d).-
anclados en el marco intermedio
, con vectores unitarios
respectivamente.
Donde
es un vector unitario, en la dirección de la coordenada j del marco
(i = 1,2,3.....), que es expresado de acuerdo a las necesidades (sus términos deben
darse en un mismo marco).
Los ángulos
(precesión y nutación) especifican la orientación del sistema x,y,z respecto al sistema
X,Y,Z, el ángulo
(spin, barrena, rotación propia, giro ) especifica el giro del cuerpo rígido respecto al
sistema X,Y,Z. Luego podemos obtener cualquier orientación del cuerpo respecto al marco
de referencia inercial, mediante una elección apropiada de los ángulos
para obtener la dirección deseada del eje de simetría y
para obtener la posición deseada del cuerpo rígido respecto a su eje de simetría.
2.3.2.2.- Velocidad angular del cuerpo rígido, utilizando los
ángulos de Euler.- Usando el teorema de adición para expresar la velocidad angular de
en
de la manera
siguiente:
(1)
a).- en
términos de las componentes del cuerpo
en
:
Luego en (1):
b).- en términos de
las componentes del marco inercial
(
en
):