IV CINÉTICA DE UN CUERPO RÍGIDO EN MOVIMIENTO PLANO
4.1.- INTRODUCCIÓN.- Se aplica las Leyes de Euler; la primera Ley gobierna el movimiento del centro de masa, que representa al movimiento de traslación del cuerpo y la segunda Ley gobierna el movimiento rotacional del cuerpo rígido, en términos de la cantidad del movimiento angular (momento cinético, ímpetu angular o momentum angular), está cantidad incluye los momentos y productos de inercia de masa del cuerpo, y su movimiento angular.
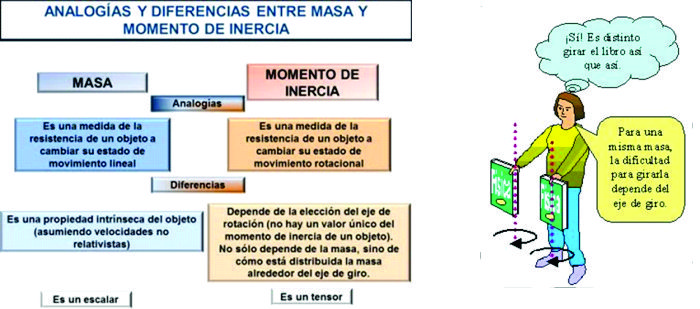
Entendiendo al momento de inercia de masa, como una medida de la resistencia de un cuerpo a acelerarse angularmente respecto al un eje en ![]() , y la masa, como una medida de la resistencia del cuerpo a acelerarse linealmente en el marco de referencia
, y la masa, como una medida de la resistencia del cuerpo a acelerarse linealmente en el marco de referencia ![]() .
.


Ejemplo:
4.2.- CANTIDAD DE MOVIMIENTO ANGULAR DE UN CUERPO RÍGIDO.-
|
Sea:
A
|
|

Por definición el momento cinético de la masa diferencial, con respecto a A es:
![]()
Para el cuerpo, el momento cinético con respecto a A es:
|
[4.2.0.0.0.1]
|
La velocidad de la masa diferencial, es:
![]()
En 4.2.0.0.0.1:
![]()
Como, ![]() es único:
es único:
|
[4.2.0.0.0.2]
|
4.2.1.- Considerando tres casos, (para 4.2.0.0.0.2).-
4.2.1.1.- Si, A es un punto fijo o extensión rígida de ![]() .- Entonces
.- Entonces ![]() , y usando "O" para designar dicho punto, se tiene:
, y usando "O" para designar dicho punto, se tiene:
|
[4.2.1.1.0.1]
|
4.2.1.2.- Si, A es el centro de masa de ![]() .- Entonces
.- Entonces ![]() , y usando "G" para designar dicho punto, se tiene:
, y usando "G" para designar dicho punto, se tiene:
|
[4.2.1.2.0.1]
|
4.2.1.3.- Si, A es un punto cualquiera diferente del punto fijo o centro de masa ("O" o "G").
Si, se tiene de la figura F4-2:
![]()
En 4.2.0.0.0.2:
![]()
![]()
|
[4.2.1.3.0.1]
|
Podemos encontrar lo deducido también, de la cinética de un sistema de partículas.- Sabiendo de la ecuación 3.5.1.5.0.2:
![]()
|
[4.2.1.3.0.2]
|
4.2.2.- Cuerpo Rígido en movimiento plano:
Sea:
A ![]() Origen del sistema de coordenadas cartesianas (xyz).
Origen del sistema de coordenadas cartesianas (xyz).
XY ![]() Plano de referencia del movimiento (paralelo con xy).
Plano de referencia del movimiento (paralelo con xy).
![]()
![]() Velocidad de "P" de masa diferencial "dm", que es la misma la de su punto acompañante Q en el plano de referencia.
Velocidad de "P" de masa diferencial "dm", que es la misma la de su punto acompañante Q en el plano de referencia.
![]()
|
|
|
Figura F4-2.2
|

![]() y
y ![]()
En 4.2.0.0.0.2:

Donde:

![]()

![]()
![]()
Donde:
![]() (Producto de inercia de masa de
(Producto de inercia de masa de ![]() , respecto a los ejes x e z a través de "A")
, respecto a los ejes x e z a través de "A")
![]() (Producto de inercia de masa de
(Producto de inercia de masa de ![]() , respecto a los ejes y e z a través de "A")
, respecto a los ejes y e z a través de "A")
![]() (Momento de inercia de la masa de
(Momento de inercia de la masa de ![]() , respecto al eje z a través de "A")
, respecto al eje z a través de "A")
Por lo tanto:
|
[4.2.2.0.0.1]
|
4.2.3.- Puntos convenientes, para el estudio del movimiento en el plano.- En 4.2.2.0.0.1
a).- Si, A es un Punto fijo o extensión rígida de ![]() .- Entonces
.- Entonces ![]() , usando "O" para designar dicho punto, se tiene:
, usando "O" para designar dicho punto, se tiene:
|
[4.2.3.0.0.1]
|
b).- Si, A es el centro de masa de ![]() .- Entonces
.- Entonces ![]() , usando "G" para designar dicho punto se tiene:
, usando "G" para designar dicho punto se tiene:
|
[4.2.3.0.0.2]
|
c).- Si, A es el centro instantáneo de velocidad nula.- Entonces ![]() , usando "Ci" para designar dicho punto se tiene:
, usando "Ci" para designar dicho punto se tiene:
|
[4.2.3.0.0.3]
|
Ver momentos de inercia de formas geométricas comunes
|
d).- Si, A es un punto cualquiera y están con el centro de masa G en un mismo plano, y el cuerpo es simétrico con el plano de movimiento de G:
Donde:
d
|
|
