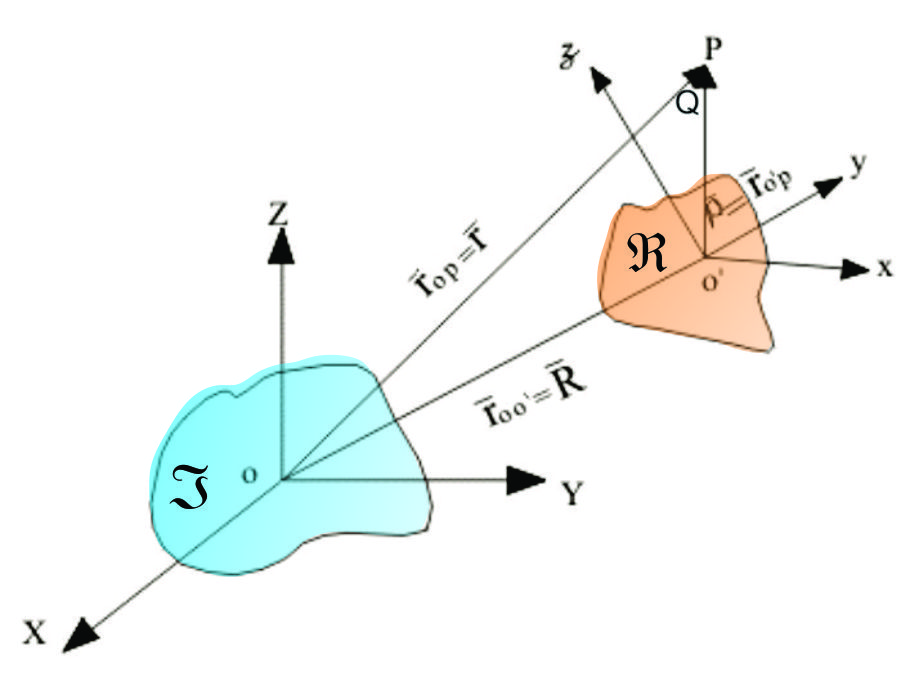
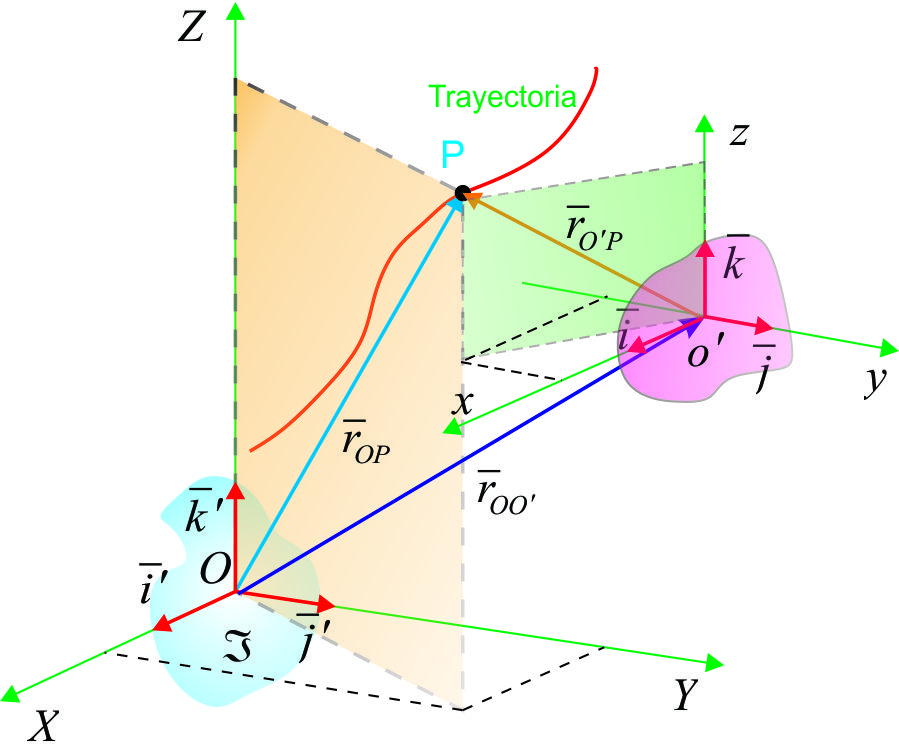
1.7.3.1.- Vector posición..
También:
1.7.3.2.- Vector velocidad.
También:
1.7.3.3.- Vector aceleración.
También:
Ordenando los términos, tenemos:
Ejemplo del efecto de la aceleración de coriolis:
Se lanza desde el centro de un tiovivo un objeto con una velocidad inicial variable. Se dibujan las trayectorias vistas por un observador en reposo (en azul) y por un observador en rotación uniforme (en rojo). Esta última está calculada teniendo en cuenta la aceleración de Coriolis y la aceleración centrífuga.
Video 1: El efecto de Coriolis.
Video 2: El efecto de Coriolis
Video 3: El efecto de Coriolis
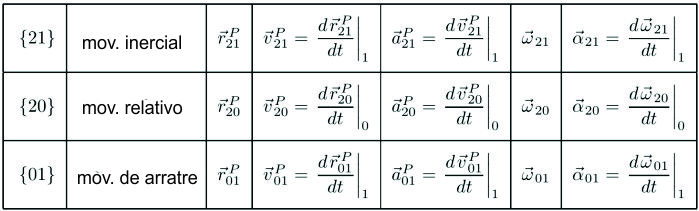
Nota.- Muchos autores utilizan la siguiente notación:
En caso de que haya tres marcos, son típicas las siguiente denominaciones y definiciones:
En cualquier caso, generalizando:
|